电力拖动自动控制系统中的仿真教学探讨
一、前言
《电力拖动自动控制系统》是电气工程及其自动化专业的主干专业课,课程知识的综合性强、覆盖面宽,综合了《自动控制原理》、《电机拖动》、《电力电子技术》、《检测技术》等课程的相关知识。该课程又是后续课,其先修课有《计算机控制系统》、《伺服控制系统》等。综合所学知识、灵活运用所学知识、建立控制系统物理系统的完整概念、理论与实际的紧密结合是该课程的特点。
在该课程的传统课堂教学中,教师一般采用“满堂灌”的教学方法讲授理论知识,学生处于完全被动的状态,只能机械地记忆原理,比较枯燥、乏味,渐渐地就失去学习兴趣,甚至厌学,因而严重地影响了教学效果。尤其学生都没有实际工作经验,对课程或知识的认识很模糊,甚至不能将所学知识与工程应用联系起来,这也不符合我们应用型人才培养的目标。
在电力拖动自动控制课程授课过程中,引入Matlab计算机仿真软件辅助教学,通过计算机仿真模型将课程内容与实际应用结合起来,老师边讲边演示,学生边学边操作,这种方式将使学生能积极的参与到课堂教学中,也能提高他们学习的兴趣和积极性。
利用Matlab中的Simulink软件进行系统仿真是十分简单和直观的,Simulink提供了使用系统模型框图进行组态的仿真平台,使用Simulink进行仿真和分析可以像在纸上绘图一样简单。应用Simulink搭建电力拖动自动控制系统通常有两种方法,一种是依据系统的动态结构图进行,另一种是依据系统的电气结构图来组建。它们各有特点,本文将分别给予说明。
二、按系统动态结构图的仿真
对自动控制系统进行动态分析是为了判断系统的稳定性以及掌握各项动态性能指标与动态参数之间的关系。以直流调速系统为例,不管是单闭环系统还是双闭环系统,系统中都包含有可变直流电源、调节器、电动机、反馈装置等环节。建立各环节的传递函数,并依据它们之间的相互关系组合起来就构成了系统的动态结构图,从而进行动态分析。在传统的课堂教学中,学生没有办法直观地观察和发现动态参数对调速性能的影响,因此可以使用Simulink按照系统的动态结构图来搭建仿真模型。
利用Simulink的Continuous模块库中的传递函数模块建立电动机、直流电源等各环节的模型并将它们组合在一起。利用这种方法建模的前提是需要知道各组成环节的传递函数,优点是系统模型简单,建模容易,参数的修改也比较方便。
图1 按动态结构图的单闭环调速系统的仿真模型
以转速负反馈单闭环直流调速系统为例,按系统动态结构图搭建的模型如图1所示。电动机空载启动,到1s时突加满载,电动机的转速和电流变化波形如图2所示。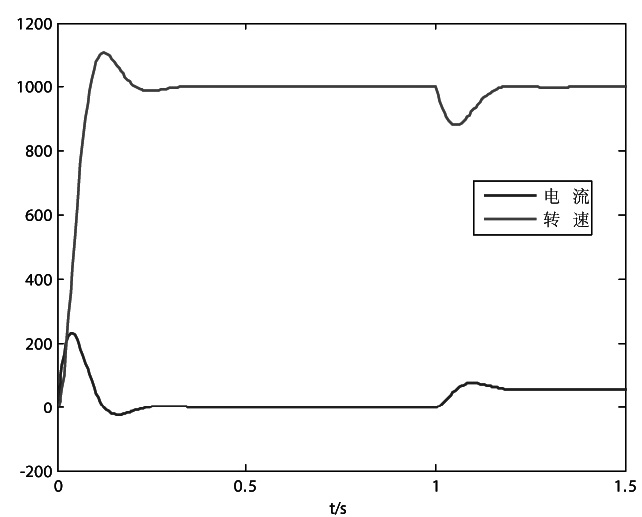
图2 单闭环调速系统输出仿真曲线
结合模型以及仿真结果可以看出:(1)电动机空载启动时的电流很大,这对学生来说就是很直观的感受。(2)在电机启动调整的过程中电流出现了反向,这是由于动态结构图中晶闸管整流器的传递函数是线性的,而实际的晶闸管整流器不能通过反向电流,所以这也是采用动态结构图建模和采用电气结构图建模的不同,后者能更好地反映系统的工作情况。(3)在突加、突减负载时,可以给予学生实时、直观的展示,加深学生对动态调节过程的理解。
教师在授课前,可以事先将模型搭建出来,在课堂上运行得到输出响应曲线。在教学时可以引导学生分析为什么启动时的电流很大,为什么在动态过程中出现了电流反向,为什么在满载时电动机也能稳定运行于给定转速。让学生带着问题再去思考所讲过的理论知识,学生的接收能力更强,学习的积极性也会更高。
三、按系统电气结构图的仿真
Simulink中的电力系统工具箱SimPowerSystems里面包含有电源、变压器、电机、电阻、电容以及各种电力电子元件,因此可以依照系统的电气结构图,从元件库中选择需要的器件进行连接即可实现系统的搭建。这里不需要事先推导各环节的传递函数,建模过程更接近于真实系统的搭建过程。以双闭环直流调速系统为例,按系统电气结构图搭建的模型如图3所示。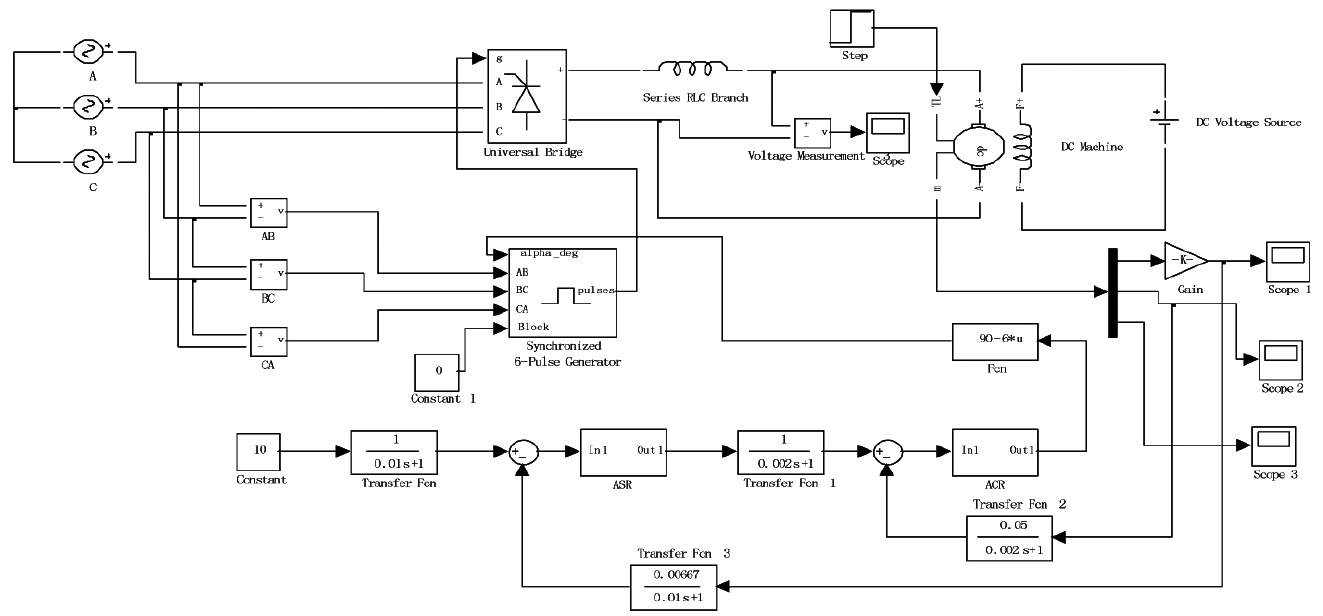
图3 按电气结构图的双闭环调速系统的仿真模型
按电气结构图搭建的系统中电源与电动机采用SimPowerSystems里面的元件来实现,系统的主电路由交流电源、晶闸管整流器、触发器、移相控制环节和电动机连接而成。控制回路的主体是转速调节器和电流调节器以及反馈滤波环节,与前述按动态结构图的单闭环系统仿真类似。与按动态结构图仿真相比,该建模方法可以使学生获得更直观、更直接的效果。电动机空载启动,到0.6s时突加满载,电动机的转速和电流变化波形如图4所示。
图4 双闭环调速系统输出仿真曲线
结合模型以及仿真结果可以看出:(1)电动机启动时电流很快上升到最大值,这是启动的第1阶段;随后维持最大电流,电动机以恒定加速度上升到给定转速,这是第2阶段;之后转速和电流相互调节,进入启动的第3阶段,直到系统达到稳定。从图上可以明显地看出这3个阶段,在授课时结合这个输出波形讲解会大大提高学生对双闭环直流调速系统起动过程的理解与掌握。(2)在0.4s时起动过程结束,电枢电流下降到0,转速上升到最高且已经超调,电流给定变负,但是晶闸管整流装置不能产生反向电流,这时电枢电流为0,又由于是空载起动,所以电动机保持在最高转速状态,这是与带载起动时最大的不同。(3)在突加负载时,转速和电流都会出现动态变化过程,如果调节器参数选择得不够好,会有一段振荡过程。
按系统动态结构图仿真和按系统电气结构图仿真都可以用于电力拖动自动控制系统的教学中,考虑到学生初步接触仿真软件以及学时限制的问题,在理论教学中用动态结构图搭建模型更简单实用。电气结构图仿真可以在做课程设计时使用,按照工程设计法求出电流调节器和转速调节器的参数,学生利用电力系统模块库中提供的元件搭建系统,完成系统的仿真。
四、结语
在电力拖动自动控制系统的课堂教学中引入Matlab仿真,加深了学生对系统的认识,使学生能将所学的知识与实际应用很好地联系起来,对于学生掌握、分析和设计自动控制系统具有重要的作用。
标签:
相关技术
2、如涉及作品内容、版权和其它问题,请在30日内与本网联系,我们将在第一时间作出适当处理!有关作品版权事宜请联系:+86-571-88970062